Unveiling Walkability Metrics: Isochrone Analysis
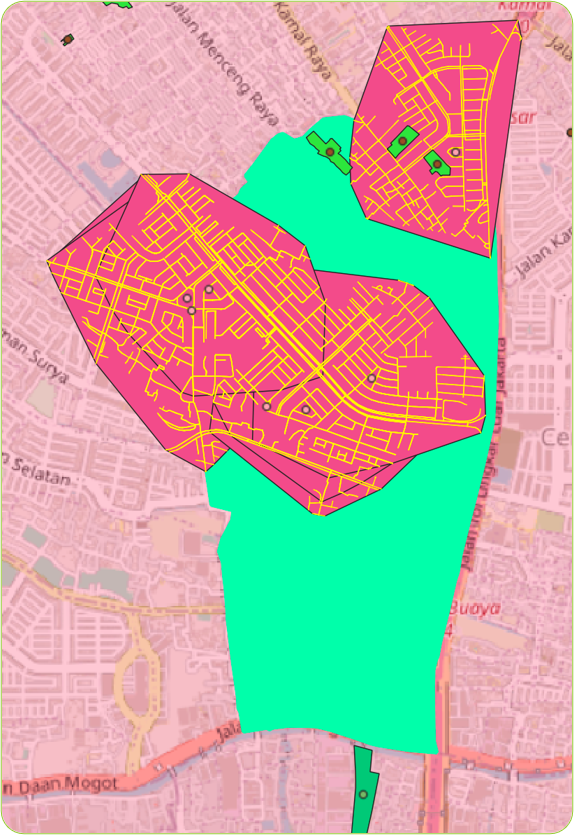
The first step involves constructing an isochrone graph centered around a point of interest (POI) with latitude and longitude coordinates over our pedestrian network. The isochrone is created based on a specified walking distance (500 meters in this example) from the POI:
from geopy.distance import geodesic
# Provide a point of interest with lat/lon coordinates
poi = (-6.153536, 106.726189)
# Compute the walking isochrone based on distance (500 meters in this example)
def compute_isochrone_for_poi(graph, poi, distance):
isochrone = nx.MultiDiGraph()
reachable_nodes = set()
for node in graph.nodes(data=True):
node_coords = (node[1]['y'], node[1]['x'])
if geodesic(poi, node_coords).meters <= distance:
reachable_nodes.add(node[0])
# Add nodes to the isochrone
isochrone.add_node(node[0], **node[1])
for u, v, key, data in graph.edges(keys=True, data=True):
if u in reachable_nodes and v in reachable_nodes:
# Add edges to the isochrone
isochrone.add_edge(u, v, key=key, **data)
# Set the CRS for the isochrone (same as G2)
isochrone.graph["crs"] = graph.graph["crs"]
return isochrone
isochrone = compute_isochrone_for_poi(G2, poi, distance=500)
This function reads the pedestrian network data and constructs an isochrone graph, laying the foundation for subsequent walkability analyses.
Generating Convex Hull for Isochrone
We take a step further by defining the spatial extent of the isochrone through a convex hull analysis. This analysis creates a convex polygon encompassing the walkable area, offering a clearer visual representation.
The following code snippet defines a function, generate_convex_hull_for_isochrone(isochrone), which computes the convex hull for the coordinates of nodes within the isochrone:
from scipy.spatial import ConvexHull
from shapely.geometry import Polygon
def generate_convex_hull_for_iscochrone(isochrone):
# Create a list to store the coordinates of nodes in the isochrone
node_coords = []
for node, data in isochrone.nodes(data=True):
node_coords.append((data['x'], data['y']))
# Compute the convex hull of the node coordinates
hull = ConvexHull(node_coords)
# Extract the convex hull vertices
hull_vertices = [node_coords[i] for i in hull.vertices]
# Create a Polygon from the convex hull vertices
convex_hull_polygon = Polygon(hull_vertices)
# Create a GeoDataFrame with the convex hull polygon
hull_gdf = gpd.GeoDataFrame({'geometry': [convex_hull_polygon]}, crs=isochrone.graph["crs"])
return hull_gdf
# Now you have a GeoDataFrame 'hull_gdf' containing the solid convex hull polygon
hull_gdf = generate_convex_hull_for_iscochrone(isochrone)
def plot_hull_for_iscochrone(hull_gdf):
#### Plot
# Create a basic plot
hull_gdf.plot()
# Add title and labels
plt.title("Your isochrone")
plt.xlabel("Longitude")
plt.ylabel("Latitude")
# Show the plot
plt.show()
hull_gdf.columns
plot_hull_for_iscochrone(hull_gdf)
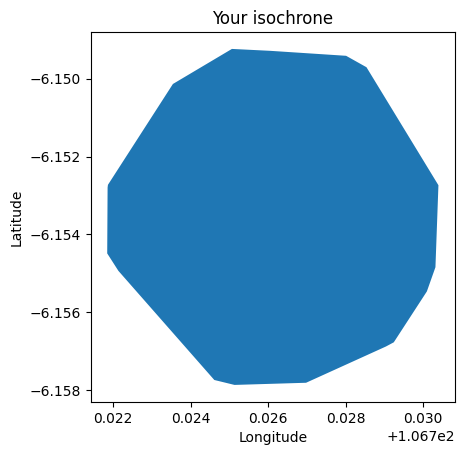
This function utilizes the scipy.spatial.ConvexHull algorithm to compute the convex hull of node coordinates within the isochrone. The resulting convex hull polygon is then encapsulated in a GeoDataFrame, hull_gdf, for further analysis.